Product Description
Smrv Worm Transmission Reductor Applied for Worm Speed Gearbox
Characteristics:
(1)Large output torque
(2) Safe, reliable, economical and durable
(3) Stable transmission, quiet operation
(4) High heat-radiating efficiency, high carrying ability
(5) Combination of 2 single-step worm gear speed reducers, meeting the requirements of super speed ratio
(6) Mechanical gearboxes are widely used in the sectors,like foodstuff, ceramics, and chemical manufacturing, as well as packing, printing, dyeing and plastics
Technical data:
(1) Motor input power:0.06kw-15kw
(2) Output torque:17-1971N.M
(3) Speed ratio of worm gear peed reducer: 5/10/15/20/25/30/40/50/60/80/100
(4) With IEC motor input flange: 56B14/71B14/80B5/90B5
Materials:
(1) NMRV571-NMRV090: Aluminium alloy housing
(2) NMRV110-150: Cast iron housing
(3) Bearing: CHINAMFG bearing & Homemade bearing
(4) Lubricant: Synthetic & Mineral
(5) The material of the worm mandrel is HT250, and the worm ring gear is ZQSn10-1.
(6) With high quality homemade bearings, assembled CHINAMFG oil seals & filled with high quality lubricant.
Operation&mantenance
(1)When worm speed reducer starts to work up to200-400 hours, its lubricant should be replaced.
(2)The gearbox need to replace the oil after 4000 hours.
(3)Worm reduction gearbox is fully filled with lubricant oil after finshed assembly.
(4)Lubricanting oil should be kept enough in the casing and checked at a fixed time.
Color:
(1) Blue / Light blue
(2) Silvery White
Quality control
(1) Quality guarantee: 1 year
(2) Certificate of quality: ISO9001:2000
(3) Every product must be tested before sending
/* May 10, 2571 16:49:51 */!function(){function d(e,r){var a,o={};try{e&&e.split(“,”).forEach(function(e,t){e&&(a=e.match(/(.*?):(.*)$/))&&1
Can you explain the impact of winch drives on the overall efficiency of lifting systems?
The efficiency of lifting systems is significantly influenced by the choice and performance of winch drives. Winch drives play a crucial role in converting power into mechanical work to lift or move heavy loads. Here’s a detailed explanation of the impact of winch drives on the overall efficiency of lifting systems:
- Power Transmission:
Winch drives are responsible for transmitting power from the energy source to the lifting mechanism. The efficiency of power transmission directly affects the overall efficiency of the lifting system. Well-designed winch drives minimize power losses due to friction, heat generation, or mechanical inefficiencies. By optimizing the gear system, bearings, and other mechanical components, winch drives can maximize power transmission efficiency and minimize energy waste.
- Mechanical Advantage:
Winch drives provide a mechanical advantage that allows the lifting system to handle heavier loads with less effort. The mechanical advantage is determined by the gear ratio and drum diameter of the winch drive. By selecting an appropriate gear ratio, the winch drive can multiply the input torque, enabling the lifting system to overcome the resistance of the load more efficiently. A higher mechanical advantage reduces the strain on the power source and improves the overall efficiency of the lifting system.
- Speed Control:
Winch drives offer speed control capabilities, allowing operators to adjust the lifting speed according to the specific requirements of the task. The ability to control the lifting speed is essential for efficient and safe operation. By utilizing winch drives with precise speed control mechanisms, the lifting system can optimize the speed to match the load, reducing unnecessary energy consumption and increasing overall efficiency.
- Load Distribution:
Winch drives play a vital role in distributing the load evenly across the lifting system. Uneven load distribution can lead to excessive stress on certain components, reducing the overall efficiency and potentially causing equipment failure. Well-designed winch drives ensure that the load is distributed evenly, minimizing stress concentrations and maximizing the efficiency of the lifting system.
- Control and Safety Features:
Winch drives incorporate control and safety features that contribute to the overall efficiency of the lifting system. Advanced control systems allow for precise positioning and smooth operation, minimizing unnecessary movements and reducing energy consumption. Safety features, such as overload protection or emergency stop mechanisms, help prevent accidents and equipment damage, ensuring uninterrupted and efficient operation of the lifting system.
- Reliability and Maintenance:
The reliability and maintenance requirements of winch drives directly impact the overall efficiency of lifting systems. Well-designed winch drives with robust construction and quality components minimize the risk of breakdowns or unplanned downtime. Additionally, winch drives that are easy to maintain and service reduce the time and resources required for maintenance, maximizing the uptime and efficiency of the lifting system.
In summary, the choice and performance of winch drives have a significant impact on the overall efficiency of lifting systems. By optimizing power transmission, providing a mechanical advantage, offering speed control, ensuring load distribution, incorporating control and safety features, and prioritizing reliability and maintenance, winch drives can enhance the efficiency, productivity, and safety of lifting operations.
How does the design of winch drives impact their performance in different environments?
The design of winch drives plays a critical role in determining their performance in different environments. Various design factors influence the reliability, efficiency, and adaptability of winch drives to specific operating conditions. Here’s a detailed explanation of how the design of winch drives impacts their performance:
- Load Capacity and Power:
The design of winch drives directly affects their load capacity and power capabilities. Factors such as motor size, gear ratio, and drum diameter determine the maximum load capacity a winch drive can handle. The power output of the motor and the mechanical advantage provided by the gear system impact the winch drive’s ability to lift or pull heavy loads effectively. A well-designed winch drive with appropriate load capacity and power ensures optimal performance in different environments.
- Speed and Control:
The design of winch drives influences their speed and control characteristics. The gear ratio and motor specifications determine the speed at which the winch drive can operate. Additionally, the presence of a variable speed control mechanism allows for precise and controlled movement of loads. The design should strike a balance between speed and control, depending on the specific application and operational requirements in different environments.
- Drive System:
Winch drives can utilize different drive systems, such as electric, hydraulic, or pneumatic. The design of the drive system impacts the performance of the winch drive in different environments. Electric winch drives are commonly used due to their ease of use, precise control, and suitability for various applications. Hydraulic winch drives offer high power output and are often preferred in heavy-duty applications. Pneumatic winch drives are suitable for environments where electricity or hydraulics are not readily available. The design should align with the specific requirements and constraints of the environment in which the winch drive will be used.
- Enclosure and Protection:
The design of the winch drive enclosure and protection features significantly impacts its performance in different environments. Winch drives used in outdoor or harsh environments should have robust enclosures that provide protection against dust, moisture, and other contaminants. Sealed or weatherproof enclosures prevent damage to internal components and ensure reliable operation. Additionally, features such as thermal protection and overload protection are designed to safeguard the winch drive from overheating or excessive strain, enhancing its performance and longevity.
- Mounting and Installation:
The design of winch drives should consider the ease of mounting and installation. Mounting options such as bolt-on, weld-on, or integrated mounting plates offer flexibility for different installation scenarios. The design should also take into account the space constraints and mounting requirements of the specific environment. Easy and secure installation ensures proper alignment, stability, and efficient operation of the winch drive.
- Control and Safety Features:
The design of winch drives includes control and safety features that impact their performance in different environments. Control systems can range from simple push-button controls to advanced remote controls or integrated control panels. The design should provide intuitive and user-friendly control interfaces for efficient operation. Safety features such as emergency stop mechanisms, load limiters, and overload protection are crucial to prevent accidents and ensure safe operation in various environments. The design should prioritize the incorporation of appropriate safety features based on the specific application and environmental conditions.
By considering these design factors, winch drives can be optimized for performance, reliability, and safety in different environments. A well-designed winch drive that aligns with the specific requirements of the environment will deliver efficient and effective lifting or pulling capabilities while ensuring long-term durability and functionality.
Can you describe the various types and configurations of winch drives available in the market?
There are several types and configurations of winch drives available in the market, each designed to suit specific applications and requirements. Here’s a detailed description of the various types and configurations of winch drives:
- Electric Winch Drives:
Electric winch drives are powered by electric motors and are widely used in various industries. They are available in different load capacities and configurations. Electric winches are known for their ease of use, precise control, and relatively low maintenance requirements. They can be mounted on vehicles, equipment, or structures and are commonly used in applications such as vehicle recovery, marine operations, construction sites, and material handling.
- Hydraulic Winch Drives:
Hydraulic winch drives are powered by hydraulic systems and offer high pulling power for heavy-duty applications. They are commonly used in industries such as construction, oil and gas, and marine operations. Hydraulic winch drives are known for their robustness, durability, and ability to handle extreme loads. They are often mounted on large vehicles, cranes, or offshore platforms. Hydraulic winch drives require hydraulic power sources, such as hydraulic pumps, and are suitable for applications that require continuous and sustained pulling power.
- Pneumatic Winch Drives:
Pneumatic winch drives utilize compressed air as the power source. They are mainly used in hazardous or explosive environments where electric or hydraulic power sources are not suitable. Pneumatic winch drives are commonly found in industries such as mining, oil refineries, and chemical plants. They offer a high level of safety due to the absence of electrical components and are capable of handling heavy loads in challenging environments.
- Planetary Winch Drives:
Planetary winch drives are a popular type of winch drive known for their compact size, high efficiency, and high torque output. They consist of a central sun gear, multiple planetary gears, and an outer ring gear. The planetary gear system allows for high torque multiplication while maintaining a compact design. Planetary winch drives are commonly used in off-road vehicles, ATV winches, and small to medium-sized industrial applications.
- Worm Gear Winch Drives:
Worm gear winch drives utilize a worm gear mechanism to achieve high gear reduction ratios. They offer excellent load holding capabilities and are commonly used in applications where precise load control and safety are paramount. Worm gear winch drives are popular in industries such as construction, theater rigging, and material handling. They are known for their self-locking feature, which prevents backdriving and provides secure load holding.
- Capstan Winch Drives:
Capstan winch drives are designed with a rotating drum or capstan instead of a traditional spool. They are commonly used in applications that require constant tension or controlled pulling speeds, such as in marine settings for mooring operations or on fishing vessels. Capstan winch drives offer efficient and continuous pulling power and are suitable for handling ropes, cables, or lines with minimal slippage.
- Wire Rope Winch Drives:
Wire rope winch drives are specifically designed to handle wire ropes as the lifting or pulling medium. They are equipped with drums that accommodate wire ropes of different diameters and lengths. Wire rope winch drives are commonly used in industries such as construction, mining, and offshore operations. They offer high load capacities and are suitable for heavy-duty applications that require strength, durability, and resistance to abrasion.
These are some of the various types and configurations of winch drives available in the market. Each type has its own advantages and is designed to cater to specific applications and industry requirements. When selecting a winch drive, it’s important to consider factors such as load capacity, power source, control mechanisms, and environmental conditions to ensure optimal performance and efficiency.
<img src="https://img.hzpt.com/img/gearbox/gearbox-l1.webp" alt="China best Aluminum Gearbox Housing Transmission Drive Motor Shaft Smrv Smr Series Reduction Worm Gearboxes Speed Gear Reducer “><img src="https://img.hzpt.com/img/gearbox/gearbox-l2.webp" alt="China best Aluminum Gearbox Housing Transmission Drive Motor Shaft Smrv Smr Series Reduction Worm Gearboxes Speed Gear Reducer “>
editor by Dream 2024-10-16
China High Torque Transmission 1500W Servo Motor Planetary Reducer Gearboxes planetary gearbox dc motor
Product Description
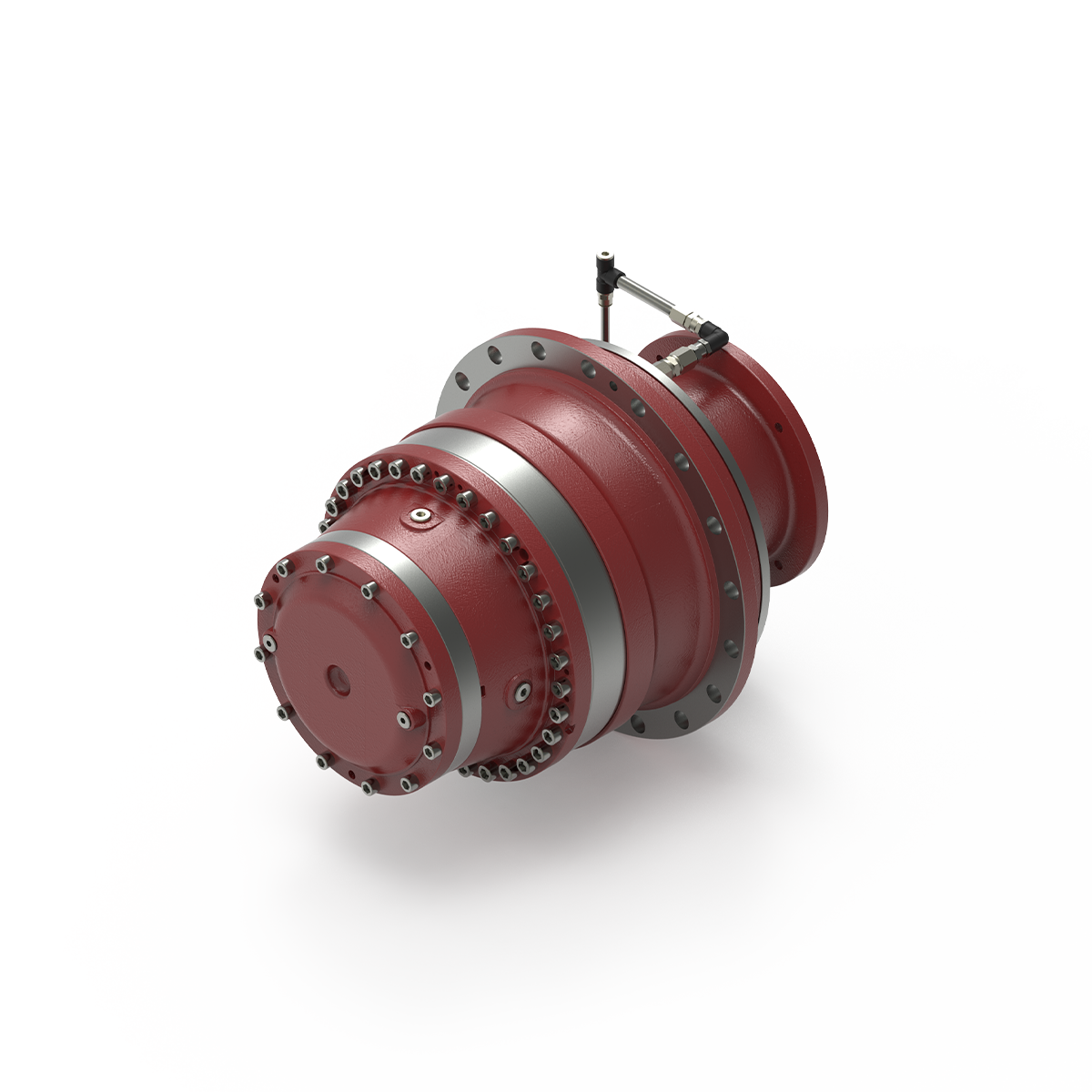
High Torque Transmission 1500w Servo Motor Planetary Speed Reducer
Planetary gearbox is a kind of reducer with wide versatility. The inner gear adopts low carbon alloy steel carburizing quenching and grinding or nitriding process. Planetary gearbox has the characteristics of small structure size, large output torque, high speed ratio, high efficiency, safe and reliable performance, etc. The inner gear of the planetary gearbox can be divided into spur gear and helical gear. Customers can choose the right precision reducer according to the needs of the application.
Product Parameters
Characteristics:
1.Hole output structure,easy installation.
2.Straight tooth drive ,single cantilever structure.simple design,economic price.
3.Working steady. Low noise.
4.Low return backlash. Can suit most occasion.
5.The input connection specifications are complete and there are many choices.
6.Keyway can be opened in the force shaft.
7.Square mount flange output,high precision,high torque.
8.Speed ratio range:3-100
9.Precision range:8-16arcmin
10.Size range:60-160mm
| Specifications | PA60 | PA90 | PA120 | PA140 | PA180 | PA220 | |||
| Technal Parameters | |||||||||
| Max. Torque | Nm | 1.5times rated torque | |||||||
| Emergency Stop Torque | Nm | 2.5times rated torque | |||||||
| Max. Radial Load | N | 1530 | 3250 | 6700 | 9400 | 14500 | 16500 | ||
| Max. Axial Load | N | 630 | 1300 | 3000 | 4700 | 7250 | 8250 | ||
| Torsional Rigidity | Nm/arcmin | 6 | 12 | 23 | 47 | 130 | 205 | ||
| Max.Input Speed | rpm | 8000 | 6000 | 6000 | 6000 | 6000 | 3000 | ||
| Rated Input Speed | rpm | 4000 | 3000 | 3000 | 3000 | 3000 | 1500 | ||
| Noise | dB | ≤58 | ≤60 | ≤65 | ≤68 | ≤68 | ≤72 | ||
| Average Life Time | h | 20000 | |||||||
| Efficiency Of Full Load | % | L1≥95% L2≥90% | |||||||
| Return Backlash | P1 | L1 | arcmin | ≤3 | ≤3 | ≤3 | ≤3 | ≤3 | ≤3 |
| L2 | arcmin | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ||
| P2 | L1 | arcmin | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | |
| L2 | arcmin | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 | ||
| Moment Of Inertia Table | L1 | 3 | Kg*cm2 | 0.16 | 0.61 | 3.25 | 9.21 | 28.98 | 69.7 |
| 4 | Kg*cm2 | 0.14 | 0.48 | 2.74 | 7.54 | 23.67 | 54.61 | ||
| 5 | Kg*cm2 | 0.13 | 0.47 | 2.71 | 7.42 | 23.29 | 53.51 | ||
| 7 | Kg*cm2 | 0.13 | 0.45 | 2.62 | 7.14 | 22.48 | 50.92 | ||
| 8 | Kg*cm2 | 0.13 | 0.45 | 2.6 | 7.14 | / | / | ||
| 10 | Kg*cm2 | 0.13 | 0.4 | 2.57 | 7.03 | 22.51 | 50.18 | ||
| L2 | 12 | Kg*cm2 | 0.13 | 0.45 | 0.45 | 2.63 | 7.3 | 23.59 | |
| 15 | Kg*cm2 | 0.13 | 0.45 | 0.45 | 2.63 | 7.3 | 23.59 | ||
| 20 | Kg*cm2 | 0.13 | 0.45 | 0.45 | 2.63 | 6.92 | 23.33 | ||
| 25 | Kg*cm2 | 0.13 | 0.45 | 0.4 | 2.63 | 6.92 | 22.68 | ||
| 28 | Kg*cm2 | 0.13 | 0.45 | 0.45 | 2.43 | 6.92 | 23.33 | ||
| 30 | Kg*cm2 | 0.13 | 0.45 | 0.45 | 2.43 | 7.3 | 25.59 | ||
| 35 | Kg*cm2 | 0.13 | 0.4 | 0.4 | 2.43 | 6.92 | 22.68 | ||
| 40 | Kg*cm2 | 0.13 | 0.45 | 0.45 | 2.43 | 6.92 | 23.33 | ||
| 50 | Kg*cm2 | 0.13 | 0.4 | 0.4 | 2.39 | 6.92 | 22.68 | ||
| 70 | Kg*cm2 | 0.13 | 0.4 | 0.4 | 2.39 | 6.72 | 22.68 | ||
| 100 | Kg*cm2 | 0.13 | 0.4 | 0.4 | 2.39 | 6.72 | 22.68 | ||
| Technical Parameter | Level | Ratio | PA60 | PA90 | PA120 | PA140 | PA180 | PA220 | |
| Rated Torque | L1 | 3 | Nm | 40 | 105 | 165 | 360 | 880 | 1100 |
| 4 | Nm | 45 | 130 | 230 | 480 | 880 | 1800 | ||
| 5 | Nm | 45 | 130 | 230 | 480 | 1100 | 1800 | ||
| 7 | Nm | 45 | 100 | 220 | 480 | 1100 | 1600 | ||
| 8 | Nm | 40 | 90 | 200 | 440 | / | / | ||
| 10 | Nm | 30 | 75 | 175 | 360 | 770 | 1200 | ||
| L2 | 12 | Nm | 40 | 105 | 165 | 360 | 880 | 1100 | |
| 15 | Nm | 40 | 105 | 165 | 360 | 880 | 1100 | ||
| 20 | Nm | 45 | 130 | 230 | 480 | 1100 | 1800 | ||
| 25 | Nm | 45 | 130 | 230 | 480 | 1100 | 1800 | ||
| 28 | Nm | 45 | 130 | 230 | 480 | 1100 | 1800 | ||
| 30 | Nm | 40 | 105 | 165 | 360 | 880 | 1100 | ||
| 35 | Nm | 45 | 130 | 230 | 480 | 1100 | 1800 | ||
| 40 | Nm | 45 | 130 | 230 | 480 | 1100 | 1800 | ||
| 50 | Nm | 45 | 130 | 230 | 480 | 1100 | 1800 | ||
| 70 | Nm | 45 | 100 | 220 | 480 | 1100 | 1600 | ||
| 100 | Nm | 30 | 75 | 175 | 360 | 770 | 1200 | ||
| Degree Of Protection | IP65 | ||||||||
| Operation Temprature | ºC | – 10ºC to -90ºC | |||||||
| Weight | L1 | kg | 1.25 | 3.75 | 8.5 | 16 | 28.5 | 49.3 | |
| L2 | kg | 1.75 | 5.1 | 12 | 21.5 | 40 | 62.5 | ||
Company Profile
Packaging & Shipping
| Application: | Motor, Motorcycle, Machinery, Marine, Agricultural Machinery, Manipulator |
|---|---|
| Function: | Change Drive Torque, Change Drive Direction, Speed Reduction |
| Layout: | Coaxial |
| Hardness: | Hardened Tooth Surface |
| Installation: | Vertical Type |
| Step: | Single-Step |
###
| Samples: |
US$ 1585/Piece
1 Piece(Min.Order) |
|---|
###
| Customization: |
Available
|
|---|
###
| Specifications | PA60 | PA90 | PA120 | PA140 | PA180 | PA220 | |||
| Technal Parameters | |||||||||
| Max. Torque | Nm | 1.5times rated torque | |||||||
| Emergency Stop Torque | Nm | 2.5times rated torque | |||||||
| Max. Radial Load | N | 1530 | 3250 | 6700 | 9400 | 14500 | 16500 | ||
| Max. Axial Load | N | 630 | 1300 | 3000 | 4700 | 7250 | 8250 | ||
| Torsional Rigidity | Nm/arcmin | 6 | 12 | 23 | 47 | 130 | 205 | ||
| Max.Input Speed | rpm | 8000 | 6000 | 6000 | 6000 | 6000 | 3000 | ||
| Rated Input Speed | rpm | 4000 | 3000 | 3000 | 3000 | 3000 | 1500 | ||
| Noise | dB | ≤58 | ≤60 | ≤65 | ≤68 | ≤68 | ≤72 | ||
| Average Life Time | h | 20000 | |||||||
| Efficiency Of Full Load | % | L1≥95% L2≥90% | |||||||
| Return Backlash | P1 | L1 | arcmin | ≤3 | ≤3 | ≤3 | ≤3 | ≤3 | ≤3 |
| L2 | arcmin | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ||
| P2 | L1 | arcmin | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | |
| L2 | arcmin | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 | ||
| Moment Of Inertia Table | L1 | 3 | Kg*cm2 | 0.16 | 0.61 | 3.25 | 9.21 | 28.98 | 69.7 |
| 4 | Kg*cm2 | 0.14 | 0.48 | 2.74 | 7.54 | 23.67 | 54.61 | ||
| 5 | Kg*cm2 | 0.13 | 0.47 | 2.71 | 7.42 | 23.29 | 53.51 | ||
| 7 | Kg*cm2 | 0.13 | 0.45 | 2.62 | 7.14 | 22.48 | 50.92 | ||
| 8 | Kg*cm2 | 0.13 | 0.45 | 2.6 | 7.14 | / | / | ||
| 10 | Kg*cm2 | 0.13 | 0.4 | 2.57 | 7.03 | 22.51 | 50.18 | ||
| L2 | 12 | Kg*cm2 | 0.13 | 0.45 | 0.45 | 2.63 | 7.3 | 23.59 | |
| 15 | Kg*cm2 | 0.13 | 0.45 | 0.45 | 2.63 | 7.3 | 23.59 | ||
| 20 | Kg*cm2 | 0.13 | 0.45 | 0.45 | 2.63 | 6.92 | 23.33 | ||
| 25 | Kg*cm2 | 0.13 | 0.45 | 0.4 | 2.63 | 6.92 | 22.68 | ||
| 28 | Kg*cm2 | 0.13 | 0.45 | 0.45 | 2.43 | 6.92 | 23.33 | ||
| 30 | Kg*cm2 | 0.13 | 0.45 | 0.45 | 2.43 | 7.3 | 25.59 | ||
| 35 | Kg*cm2 | 0.13 | 0.4 | 0.4 | 2.43 | 6.92 | 22.68 | ||
| 40 | Kg*cm2 | 0.13 | 0.45 | 0.45 | 2.43 | 6.92 | 23.33 | ||
| 50 | Kg*cm2 | 0.13 | 0.4 | 0.4 | 2.39 | 6.92 | 22.68 | ||
| 70 | Kg*cm2 | 0.13 | 0.4 | 0.4 | 2.39 | 6.72 | 22.68 | ||
| 100 | Kg*cm2 | 0.13 | 0.4 | 0.4 | 2.39 | 6.72 | 22.68 | ||
| Technical Parameter | Level | Ratio | PA60 | PA90 | PA120 | PA140 | PA180 | PA220 | |
| Rated Torque | L1 | 3 | Nm | 40 | 105 | 165 | 360 | 880 | 1100 |
| 4 | Nm | 45 | 130 | 230 | 480 | 880 | 1800 | ||
| 5 | Nm | 45 | 130 | 230 | 480 | 1100 | 1800 | ||
| 7 | Nm | 45 | 100 | 220 | 480 | 1100 | 1600 | ||
| 8 | Nm | 40 | 90 | 200 | 440 | / | / | ||
| 10 | Nm | 30 | 75 | 175 | 360 | 770 | 1200 | ||
| L2 | 12 | Nm | 40 | 105 | 165 | 360 | 880 | 1100 | |
| 15 | Nm | 40 | 105 | 165 | 360 | 880 | 1100 | ||
| 20 | Nm | 45 | 130 | 230 | 480 | 1100 | 1800 | ||
| 25 | Nm | 45 | 130 | 230 | 480 | 1100 | 1800 | ||
| 28 | Nm | 45 | 130 | 230 | 480 | 1100 | 1800 | ||
| 30 | Nm | 40 | 105 | 165 | 360 | 880 | 1100 | ||
| 35 | Nm | 45 | 130 | 230 | 480 | 1100 | 1800 | ||
| 40 | Nm | 45 | 130 | 230 | 480 | 1100 | 1800 | ||
| 50 | Nm | 45 | 130 | 230 | 480 | 1100 | 1800 | ||
| 70 | Nm | 45 | 100 | 220 | 480 | 1100 | 1600 | ||
| 100 | Nm | 30 | 75 | 175 | 360 | 770 | 1200 | ||
| Degree Of Protection | IP65 | ||||||||
| Operation Temprature | ºC | – 10ºC to -90ºC | |||||||
| Weight | L1 | kg | 1.25 | 3.75 | 8.5 | 16 | 28.5 | 49.3 | |
| L2 | kg | 1.75 | 5.1 | 12 | 21.5 | 40 | 62.5 | ||
| Application: | Motor, Motorcycle, Machinery, Marine, Agricultural Machinery, Manipulator |
|---|---|
| Function: | Change Drive Torque, Change Drive Direction, Speed Reduction |
| Layout: | Coaxial |
| Hardness: | Hardened Tooth Surface |
| Installation: | Vertical Type |
| Step: | Single-Step |
###
| Samples: |
US$ 1585/Piece
1 Piece(Min.Order) |
|---|
###
| Customization: |
Available
|
|---|
###
| Specifications | PA60 | PA90 | PA120 | PA140 | PA180 | PA220 | |||
| Technal Parameters | |||||||||
| Max. Torque | Nm | 1.5times rated torque | |||||||
| Emergency Stop Torque | Nm | 2.5times rated torque | |||||||
| Max. Radial Load | N | 1530 | 3250 | 6700 | 9400 | 14500 | 16500 | ||
| Max. Axial Load | N | 630 | 1300 | 3000 | 4700 | 7250 | 8250 | ||
| Torsional Rigidity | Nm/arcmin | 6 | 12 | 23 | 47 | 130 | 205 | ||
| Max.Input Speed | rpm | 8000 | 6000 | 6000 | 6000 | 6000 | 3000 | ||
| Rated Input Speed | rpm | 4000 | 3000 | 3000 | 3000 | 3000 | 1500 | ||
| Noise | dB | ≤58 | ≤60 | ≤65 | ≤68 | ≤68 | ≤72 | ||
| Average Life Time | h | 20000 | |||||||
| Efficiency Of Full Load | % | L1≥95% L2≥90% | |||||||
| Return Backlash | P1 | L1 | arcmin | ≤3 | ≤3 | ≤3 | ≤3 | ≤3 | ≤3 |
| L2 | arcmin | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ||
| P2 | L1 | arcmin | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | ≤5 | |
| L2 | arcmin | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 | ≤7 | ||
| Moment Of Inertia Table | L1 | 3 | Kg*cm2 | 0.16 | 0.61 | 3.25 | 9.21 | 28.98 | 69.7 |
| 4 | Kg*cm2 | 0.14 | 0.48 | 2.74 | 7.54 | 23.67 | 54.61 | ||
| 5 | Kg*cm2 | 0.13 | 0.47 | 2.71 | 7.42 | 23.29 | 53.51 | ||
| 7 | Kg*cm2 | 0.13 | 0.45 | 2.62 | 7.14 | 22.48 | 50.92 | ||
| 8 | Kg*cm2 | 0.13 | 0.45 | 2.6 | 7.14 | / | / | ||
| 10 | Kg*cm2 | 0.13 | 0.4 | 2.57 | 7.03 | 22.51 | 50.18 | ||
| L2 | 12 | Kg*cm2 | 0.13 | 0.45 | 0.45 | 2.63 | 7.3 | 23.59 | |
| 15 | Kg*cm2 | 0.13 | 0.45 | 0.45 | 2.63 | 7.3 | 23.59 | ||
| 20 | Kg*cm2 | 0.13 | 0.45 | 0.45 | 2.63 | 6.92 | 23.33 | ||
| 25 | Kg*cm2 | 0.13 | 0.45 | 0.4 | 2.63 | 6.92 | 22.68 | ||
| 28 | Kg*cm2 | 0.13 | 0.45 | 0.45 | 2.43 | 6.92 | 23.33 | ||
| 30 | Kg*cm2 | 0.13 | 0.45 | 0.45 | 2.43 | 7.3 | 25.59 | ||
| 35 | Kg*cm2 | 0.13 | 0.4 | 0.4 | 2.43 | 6.92 | 22.68 | ||
| 40 | Kg*cm2 | 0.13 | 0.45 | 0.45 | 2.43 | 6.92 | 23.33 | ||
| 50 | Kg*cm2 | 0.13 | 0.4 | 0.4 | 2.39 | 6.92 | 22.68 | ||
| 70 | Kg*cm2 | 0.13 | 0.4 | 0.4 | 2.39 | 6.72 | 22.68 | ||
| 100 | Kg*cm2 | 0.13 | 0.4 | 0.4 | 2.39 | 6.72 | 22.68 | ||
| Technical Parameter | Level | Ratio | PA60 | PA90 | PA120 | PA140 | PA180 | PA220 | |
| Rated Torque | L1 | 3 | Nm | 40 | 105 | 165 | 360 | 880 | 1100 |
| 4 | Nm | 45 | 130 | 230 | 480 | 880 | 1800 | ||
| 5 | Nm | 45 | 130 | 230 | 480 | 1100 | 1800 | ||
| 7 | Nm | 45 | 100 | 220 | 480 | 1100 | 1600 | ||
| 8 | Nm | 40 | 90 | 200 | 440 | / | / | ||
| 10 | Nm | 30 | 75 | 175 | 360 | 770 | 1200 | ||
| L2 | 12 | Nm | 40 | 105 | 165 | 360 | 880 | 1100 | |
| 15 | Nm | 40 | 105 | 165 | 360 | 880 | 1100 | ||
| 20 | Nm | 45 | 130 | 230 | 480 | 1100 | 1800 | ||
| 25 | Nm | 45 | 130 | 230 | 480 | 1100 | 1800 | ||
| 28 | Nm | 45 | 130 | 230 | 480 | 1100 | 1800 | ||
| 30 | Nm | 40 | 105 | 165 | 360 | 880 | 1100 | ||
| 35 | Nm | 45 | 130 | 230 | 480 | 1100 | 1800 | ||
| 40 | Nm | 45 | 130 | 230 | 480 | 1100 | 1800 | ||
| 50 | Nm | 45 | 130 | 230 | 480 | 1100 | 1800 | ||
| 70 | Nm | 45 | 100 | 220 | 480 | 1100 | 1600 | ||
| 100 | Nm | 30 | 75 | 175 | 360 | 770 | 1200 | ||
| Degree Of Protection | IP65 | ||||||||
| Operation Temprature | ºC | – 10ºC to -90ºC | |||||||
| Weight | L1 | kg | 1.25 | 3.75 | 8.5 | 16 | 28.5 | 49.3 | |
| L2 | kg | 1.75 | 5.1 | 12 | 21.5 | 40 | 62.5 | ||
Planetary Gearbox Advantages and Disadvantages
A planetary gearbox is a type of mechanical drive with a single output shaft. They are suitable for both clockwise and counterclockwise rotations, have less inertia, and operate at higher speeds. Here are some advantages and disadvantages of this type of gearbox. Let us see what these advantages are and why you should use them in your applications. Listed below are some of the benefits of planetary gearboxes.
Suitable for counterclockwise and clockwise rotation
If you want to teach children about the clock hands, you can buy some resources for counterclockwise and asymmetrical rotation. These resources include worksheets for identifying degrees of rotation, writing rules for rotation, and visual processing. You can also use these resources to teach angles. For example, the translation of shapes activity pack helps children learn about the rotation of geometric shapes. Similarly, the visual perception activity sheet helps children understand how to process information visually.
Various studies have been done to understand the anatomical substrate of rotations. In a recent study, CZPT et al. compared the position of the transitional zone electrocardiographically and anatomically. The authors found that the transitional zone was normal in nine of 33 subjects, indicating that rotation is not a sign of disease. Similarly, a counterclockwise rotation may be caused by a genetic or environmental factor.
The core tip data should be designed to work in both clockwise and counterclockwise rotation. Counterclockwise rotation requires a different starting point than a clockwise rotation. In North America, star-delta starting is used. In both cases, the figure is rotated about its point. Counterclockwise rotation, on the other hand, is done in the opposite direction. In addition, it is possible to create counterclockwise rotation using the same gimbal.
Despite its name, both clockwise and counterclockwise rotation requires a certain amount of force to rotate. When rotating clockwise, the object faces upwards. Counterclockwise rotation, on the other hand, starts from the top position and heads to the right. If rotating in the opposite direction, the object turns counterclockwise, and vice versa. The clockwise movement, in contrast, is the reverse of counterclockwise rotation.
Has less inertia
The primary difference between a planetary gearbox and a normal pinion-and-gear reducer is the ratio. A planetary gearbox will produce less inertia, which is an important advantage because it will reduce torque and energy requirements. The ratio of the planetary gearbox to its fixed axis counterpart is a factor of three. A planetary gearbox has smaller gears than a conventional planetary, so its inertia is proportional to the number of planets.
Planetary gears are less inertia than spur gears, and they share the load across multiple gear teeth. This means that they will have low backlash, and this is essential for applications with high start-stop cycles and frequent rotational direction changes. Another benefit is the high stiffness. A planetary gearbox will have less backlash than a spur gearbox, which means that it will be more reliable.
A planetary gearbox can use either spur or helical gears. The former provides higher torque ratings while the latter has less noise and stiffness. Both types of gears are useful in motorsports, aerospace, truck transmissions, and power generation units. They require more assembly time than a conventional parallel shaft gear, but the PD series is the more efficient alternative. PD series planetary gears are suitable for many applications, including servo and robotics.
In contrast, a planetary gear set can have varying input speed. This can affect the frequency response of the gearset. A mathematical model of the two-stage planetary gears has non-stationary effects and correlates with experimental findings. Fig. 6.3 shows an addendum. The dedendum’s minimum value is approximately 1.25m. When the dedendum is at its smallest, the dedendum has less inertia.
Offers greater reliability
The Planetary Gearbox is a better option for driving a vehicle than a standard spur gearbox. A planetary gearbox is less expensive, and they have better backlash, higher load capacity, and greater shock loads. Unlike spur gearboxes, however, mechanical noise is virtually nonexistent. This makes them more reliable in high-shock situations, as well as in a wide range of applications.
The Economy Series has the same power density and torque capacity of the Precision Helical Series, but it lacks the precision of the latter. In contrast, Economy Series planetary gearboxes feature straight spur planetary gearing, and they are used in applications requiring high torque. Both types of gearboxes are compatible with NEMA servo motors. If torque density is important, a planetary gearbox is the best choice.
The Dispersion of External Load: The SSI model has been extensively used to model the reliability of planetary gear systems. This model takes the contact force and fatigue strength of the system as generalized stress and strength. It also provides a theoretical framework to evaluate the reliability of planetary gear systems. It also has many other advantages that make it the preferred choice for high-stress applications. The Planetary Gearbox offers greater reliability and efficiency than traditional rack and pinion gear systems.
Planetary gearing has greater reliability and compact design. Its compact design allows for wider applications with concerns about space and weight. Additionally, the increased torque and reduction makes planetary gearboxes an excellent choice for a wide variety of applications. There are three major types of planetary gearboxes, each with its own advantages. This article describes a few of them. Once you understand their workings, you will be able to choose the best planetary gearbox for your needs.
Has higher operating speeds
When you look at planetary gearboxes, you might be confused about which one to choose. The primary issue is the application of the gearbox. You must also decide on secondary factors like noise level, corrosion resistance, construction, price, and availability worldwide. Some constructors work faster than others and deliver the gearboxes on the same day. However, the latter ones often deliver the planetary gearbox out of stock.
Compared to conventional gearboxes, a planetary gearbox can run at higher speeds when the input speed fluctuates. However, these gears are not very efficient in high-speed applications because of their increased noise levels. This makes planetary gears unsuitable for applications involving a great deal of noise. That is why most planetary gears are used in small-scale applications. There are some exceptions, but in general, a planetary gearbox is better suited for applications with higher operating speeds.
The basic planetary gearbox is a compact alternative to normal pinion-and-gear reducers. They can be used in a wide variety of applications where space and weight are concerns. Its efficiency is also higher, delivering 97% of the power input. It comes in three different types based on the performance. A planetary gearbox can also be classified as a worm gear, a spur gear, or a sprocket.
A planetary gearhead has a high-precision design and can generate substantial torque for their size. It also reduces backlash to two arc-min. Additionally, it is lubricated for life, which means no maintenance is needed. It can fit into a small machine envelope and has a small footprint. Moreover, the helical crowned gearing provides fast positioning. A sealed gearbox prevents abrasive dust from getting into the planetary gearhead.
Has drawbacks
The design of a planetary gearbox is compact and enables high torque and load capability in a small space. This gear arrangement also reduces the possibility of wear and tear. Planet gears are arranged in a planetary fashion, allowing gears to shift under load and a uniform distribution of torque. However, some disadvantages of planetary gears must be considered before investing in this gearbox.
While the planetary gearbox is a high precision motion-control device, its design and maintenance requirements are a concern. The bearing load is high, requiring frequent lubrication. Also, they are inaccessible. Despite these drawbacks, planetary gearboxes are suitable for a variety of tasks. They also have low backlash and high torsional stiffness, making them excellent choices for many applications.
As a result, the speed of a planetary gearbox varies with load and speed. At lower ratios, the sun gear becomes too large in relation to the planet gears. As the ratio increases, the sun gear will become too low, reducing torque. The planetary gears also reduce their torque in high-speed environments. Consequently, the ratio is a crucial consideration for planetary gearbox condition monitoring.
Excess drag may result from out-of-tolerance components or excessive lubrication. Drag should be measured both in directions and be within acceptable ranges. Grease and oil lubrication are two common planetary gearbox lubricants, but the choice is largely dependent on your application. While grease lubricates planetary gears well, oil needs maintenance and re-lubrication every few thousand hours.


editor by czh 2022-12-01